
Detectores de metales, hace décadas, tenían una capacidad de profundidad muy limitada. Por lo tanto, aumentar la profundidad de detección fue un foco principal para todos los detectoristas. La publicidad con detector de metales siempre ha hecho que la «mayor profundidad» sea parte del punto de venta de la mayoría de los nuevos detectores. Este enfoque en «más profundidad» tuvo sentido durante mucho tiempo pero, más recientemente; se ha demostrado que más profundidad es solo una parte de la ecuación …
Fondo
Más profundidad no siempre significa que se harán más buenos hallazgos. La suposición es que las monedas, las joyas y las reliquias terminan cada vez más en el suelo con el tiempo, pero eso no es cierto en muchas áreas. Las áreas más secas y con vegetación a menudo no tienen las condiciones que hacen que los objetos se entierren más profundamente. Los únicos hallazgos que hay que hacer son a menudo relativamente poco profundos, sin nada más profundo. También existen limitaciones prácticas sobre la profundidad con que una persona puede cavar un hoyo en algunos lugares. La profundidad del detector de metales casi siempre se prueba en un solo objetivo enterrado en el suelo, sin ningún otro objetivo de distracción cerca. Sin embargo, en muchos lugares, no es inusual tener más de un solo objetivo debajo de la bobina detectora a la vez. Cuando esto sucede, ¿cómo reacciona un detector? Generalmente hay dos posibilidades que se combinan entre sí:
En primer lugar, algunos detectores pueden detectar varios elementos debajo de la bobina y promediarlos juntos en una respuesta objetivo. Las combinaciones de elementos ferrosos y artículos no ferrosos debajo de la bobina a menudo disminuirán los números de identificación del objetivo. La respuesta de múltiples ítems no ferrosos a menudo es acumulativa, con varios ítems que tienen un ID objetivo más bajo que se informa como un solo ítem con un ID objetivo más alto. Estos cambios en la identificación del objetivo a menudo pueden causar la pérdida de elementos deseados.
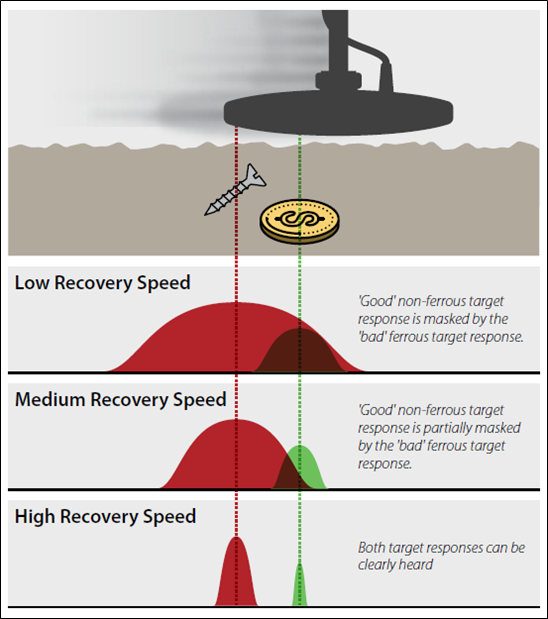
En segundo lugar, se produce un problema peor cuando los elementos debajo de la bobina se encuentran a distintas profundidades. Los objetivos menos profundos generalmente tienen prioridad sobre los objetos más profundos. En realidad, esto puede ser bastante sorprendente, ya que un objeto pequeño a unas pocas pulgadas de distancia de un objeto más grande pero más profundo hará que el elemento más profundo se ignore por completo, y el detector solo informe el elemento poco profundo. El elemento más profundo está oculto o ‘enmascarado’ por el elemento más somero.
Estos dos escenarios son ambas formas de «enmascaramiento de objetivo», en el que los elementos deseados se pierden debido a la proximidad cercana a elementos no deseados. Después de décadas de detección por parte de muchos buenos detectores de búsqueda profunda, es bastante probable en la actualidad que se puedan encontrar elementos más deseables, ocultos a poca profundidad por el objetivo de enmascaramiento, que los que se pueden encontrar teniendo un detector que va un poco más profundo. Esto es afortunado, de alguna manera, porque hay límites en la profundidad del detector impuestos por la física, y ya estamos bastante cerca de esos límites. Esto significa que muchos detectoristas deberían considerar cambiar su enfoque para no profundizar y enfocarse más en encontrar objetivos que otros detectores hayan omitido.En muchos de los entornos más ricos en objetivos, la atención debe centrarse más en vencer el enmascaramiento objetivo que en lograr una profundidad más absoluta.
¿Qué es la velocidad de recuperación?
Varios términos definen qué tan bien los detectores de metales pueden separar los artículos estrechamente espaciados. A veces se describe como retraso de la recuperación o reactividad, pero tal vez un término más común en uso ha sido la velocidad de recuperación.
 Podría pensar en los detectores de metales digitales que informan lo que está sucediendo debajo de la bobina como tomando una «instantánea» y mostrando el resultado como un número de identificación objetivo. Cada instantánea puede ser de mayor o menor duración, pero solo se puede informar un número de ID de objetivo para cada instantánea. Para localizar e identificar dos objetivos juntos, el detector debe poder tomar dos instantáneas, una para cada objetivo. La velocidad de recuperación define qué tan rápido un detector puede informar varios elementos que están muy juntos.
Podría pensar en los detectores de metales digitales que informan lo que está sucediendo debajo de la bobina como tomando una «instantánea» y mostrando el resultado como un número de identificación objetivo. Cada instantánea puede ser de mayor o menor duración, pero solo se puede informar un número de ID de objetivo para cada instantánea. Para localizar e identificar dos objetivos juntos, el detector debe poder tomar dos instantáneas, una para cada objetivo. La velocidad de recuperación define qué tan rápido un detector puede informar varios elementos que están muy juntos.
Imagine que tiene tres monedas diferentes en una fila, tres pulgadas de distancia, nueve pulgadas en total. Las tres monedas pueden estar debajo de la bobina al mismo tiempo. Para este ejemplo, supongamos que lleva exactamente un segundo mover la bobina nueve pulgadas sobre todas las monedas. Nuestro detector imaginario tiene un control de velocidad de recuperación calibrado de 1 a 3, y cada ajuste representa velocidades de recuperación más rápidas. La configuración de 1 significa que el detector puede tomar una instantánea por segundo. Una configuración de 2 es dos instantáneas por segundo y 3 significa tres instantáneas por segundo.
Establece el detector a la velocidad de recuperación 1 y hace que el segundo oscile sobre las monedas. La primera moneda suena un segundo pitido con una ID de objetivo y las otras dos monedas se ignoran o la ID objetivo se promedia junto con la primera moneda para producir una ID de objetivo menos precisa. Recuerde, ignorar elementos o producir números de ID de objetivo inexactos debido a elementos adyacentes cercanos se conoce como enmascaramiento de objetivos.
Establecer la velocidad de recuperación en 2 significa que el detector puede tomar dos instantáneas por segundo. Ahora la primera moneda hace un pitido de medio segundo con ID objetivo. La segunda moneda es ignorada / promediada (enmascarada). El detector se reinicia (recupera) y toma otra instantánea de medio segundo, informando la tercera moneda con una señal limpia e ID objetivo.
Finalmente, una configuración de velocidad de recuperación de 3 produce tres pitidos cortos pero limpios con números de ID de objetivo precisos en las tres monedas. Genial, entonces, ¿por qué no simplemente establecer el control en 3 y olvidarse de él?
En los ejemplos anteriores, una velocidad de recuperación más rápida se traduce directamente en informes de audio más cortos. El problema es que cuando se detectan objetivos muy profundos, un detector ya está trabajando con información mínima, por lo que los objetivos más profundos ya tienden a ser débiles o débiles. Una velocidad de recuperación muy rápida puede tomar lo que ya es una señal de objetivo mínima y reducirlo aún más hasta el punto en que ya no se oye claramente o no se escucha en absoluto.
En resumen, las velocidades de recuperación más rápidas ayudan a separar los objetivos adyacentes y a minimizar el enmascaramiento objetivo. Las velocidades de recuperación más lentas ayudan a producir señales de audio más completas y más fáciles de escuchar en objetivos más profundos.
La ventaja EQUINOX
Una de las principales formas en que el nuevo EQUINOX difiere de los detectores de frecuencias múltiples anteriores de Minelab es que tiene opciones de velocidad de recuperación mucho más rápidas. Una de las pocas debilidades en los modelos anteriores de BBS y FBS es la tendencia al enmascaramiento de objetivos, especialmente en entornos muy ricos en objetivos. Minelab atacó específicamente este problema con la nueva tecnología Multi-IQ, que puede emplear veloces velocidades de recuperación. EQUINOX lo hace tan bien que no solo excede la velocidad de la mayoría de los detectores de frecuencia individual, sino que lo hace mientras opera en múltiples frecuencias.
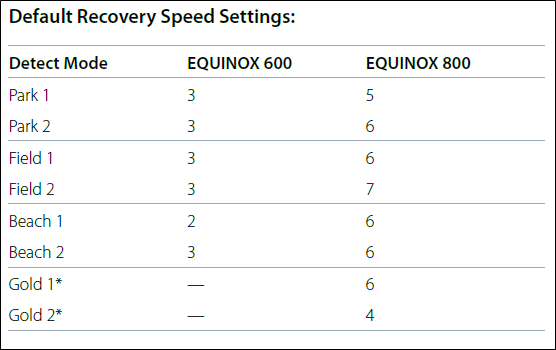 En mi opinión, una de las mejores cosas acerca de los nuevos modelos EQUINOX son los preajustes de fábrica bien diseñados. Nota: estos están configurados para mayores velocidades de recuperación. Uno de los mayores errores que veo que hacen los nuevos usuarios es asumir que los ajustes preestablecidos no están bien pensados e intentar de inmediato encontrar lo que creen que son mejores configuraciones. En particular, algunos propietarios de Minelab anteriores parecen decididos a ir de inmediato a velocidades de recuperación más lentas buscando «más profundidad» . Aquellos que lo hacen ignoran una de las principales ventajas de EQUINOX frente a otros detectores. Este es realmente el caso en que los nuevos propietarios deben tener un poco de fe en los ajustes preestablecidos e ir con ellos inicialmente.
En mi opinión, una de las mejores cosas acerca de los nuevos modelos EQUINOX son los preajustes de fábrica bien diseñados. Nota: estos están configurados para mayores velocidades de recuperación. Uno de los mayores errores que veo que hacen los nuevos usuarios es asumir que los ajustes preestablecidos no están bien pensados e intentar de inmediato encontrar lo que creen que son mejores configuraciones. En particular, algunos propietarios de Minelab anteriores parecen decididos a ir de inmediato a velocidades de recuperación más lentas buscando «más profundidad» . Aquellos que lo hacen ignoran una de las principales ventajas de EQUINOX frente a otros detectores. Este es realmente el caso en que los nuevos propietarios deben tener un poco de fe en los ajustes preestablecidos e ir con ellos inicialmente.
En lugar de intentar convertir el EQUINOX en otro detector, aproveche sus nuevas capacidades para obtener mejores resultados. Esto significa buscar áreas en las que la basura es más densa y es más probable que el objetivo oculte objetivos a profundidades relativamente poco profundas. Las velocidades de recuperación rápidas también ayudan en profundidad en suelos altamente mineralizados y cualquier persona que trabaje en algo más que una mineralización moderada definitivamente debe mantener velocidades de recuperación más altas.
Las personas que emplean mucho rechazo de objetivo o muescas de discriminación a menudo no son conscientes de cuán densa es la basura porque ha sido bloqueada. Recomiendo encarecidamente que el tono de umbral lo utilice cualquiera que rechace muchas respuestas de destino. Un tono de umbral será ‘nulo’ o ‘en blanco’ al pasar por encima de los objetivos rechazados, lo que le dará una mejor idea de qué tan densa es la basura. Una alternativa es no rechazar ningún elemento e ir estrictamente por tonos. Con todos los elementos que se escuchan, tiene una mejor idea de lo denso que puede ser el entorno objetivo.
Cazo en terreno muy mineralizado y, por esta razón, casi nunca dejo caer mi velocidad de recuperación por debajo de 5 en el EQUINOX 800 y, si tuviera un EQUINOX 600, probablemente casi nunca usaría nada más que el ajuste más alto de 3, con 2 usados para solo las ocasiones más raras. Una vez más, las velocidades de recuperación rápidas definitivamente ayudan en terreno altamente mineralizado y deberían ser las configuraciones normales en tal suelo, independientemente de la densidad objetivo. También me gusta emplear tonos completos.
Aquí hay un escenario del mundo real, para mí, en un parque local …
Podría comenzar en un área abierta con una velocidad de recuperación de 5 en mi EQUINOX 800. Al acercarme a un área de picnic, noto (escuchando los tonos) que la densidad objetivo está aumentando. Tan pronto como empiece a escuchar más de uno o dos objetivos por cada swing, aumentaré la velocidad de recuperación hasta 6. Luego, cuando entre en varios elementos por swing, probablemente subiré nuevamente la velocidad de recuperación a 7. Si me meto en un área más abierta otra vez, bajaré la velocidad de recuperación. Lo que estoy haciendo es hacer coincidir la velocidad de recuperación con la densidad objetivo de la ubicación, lo cual solo puedo saber si escucho todos los objetivos. En áreas con menos objetivos, puedo mejorar la respuesta para objetivos más profundos pero, en áreas con objetivos densos, me enfoco más en eliminar el enmascaramiento objetivo.
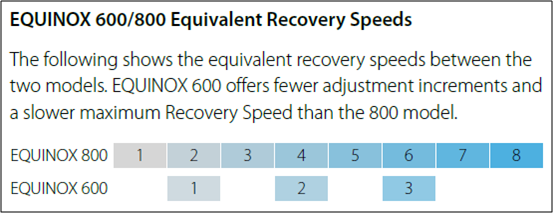 Una cosa buena del 800 frente al 600 es que la configuración de velocidad de recuperación tiene un rango más amplio Y un grado de control más fino.
Una cosa buena del 800 frente al 600 es que la configuración de velocidad de recuperación tiene un rango más amplio Y un grado de control más fino.
Si cazas menos tierra mineralizada que yo, tienes más opciones con velocidades de recuperación más lentas. En áreas con pocos objetivos, usaría la configuración más lenta pero, de nuevo, siempre voy a ajustes más rápidos, cuanto más densa sea la basura. La principal forma de beneficiarse del control de velocidad de recuperación es conocer, en todo momento, la densidad objetivo. Esto se hace mejor usando un tono de umbral que anula los objetivos rechazados o usando tonos completos para alertarlo sobre todos los objetivos.
EQUINOX tiene bastantes puntos fuertes sobre los modelos previos de Minelab BBS y FBS, pero solo puede aprovechar esos puntos fuertes si sabe cuáles son y aprovecharlos para su ventaja. La velocidad de recuperación rápida es una de las herramientas más potentes en la caja de herramientas de EQUINOX, así que espero que no desperdicie esa ventaja.
Todavía hay una gran cantidad de buenos hallazgos que se pueden hacer en casi cualquier lugar, los blancos de basura están alfombrando el suelo. Tome un EQUINOX, use velocidades de recuperación rápidas y ¡búsquelos!


